Teilprojekte
In drei Entwicklungs-Clustern und zwei übergreifenden Arbeitsgruppen werden neuartige Methoden zur Integration von Robotersystemen in der Klinik entwickelt. Der Entwicklungsprozess reicht dabei von Anforderungsanalysen bis hin zur abschließenden Validierung der gewonnenen Methoden. Das Teilprojekt Administration ist mit der Koordination und Lenkung des Vorhabens betraut.
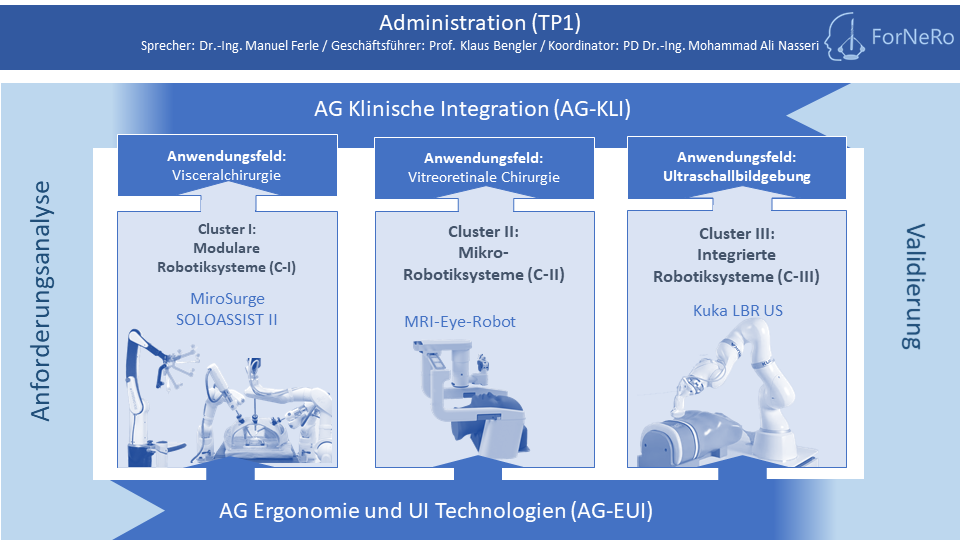
Im Folgenden werden die einzelnen Teilprojekte, die in Form von Arbeitsgruppen und Clustern repräsentiert sind, näher vorgestellt:
TP1 – Administration
Das Teilprojekt dient der fachlichen und administrativen Koordination des Forschungsverbundes, der Organisation und Kommunikation zwischen allen Beteiligten sowie der Außendarstellung des Verbundes. Die Übergreifenden Ziele des Teilprojektes sind das strategische und administrative Management (Finanzen, Berichte, Verbundmeetings etc.), die Qualitätssicherung und die Öffentlichkeitsarbeit. Innerhalb dieses Teilprojektes werden alle Vorkehrungen getroffen, um einen effizienten Start und Abschluss des Projektes sicherzustellen und um im Laufe des Projektes ein dynamisches Projekt- und Risikomanagement zu gewährleisten. Über das TP1 wird zudem die Berichterstellung, die Haushaltung des Projektbudgets und die Außendarstellung koordiniert. Die Organisation von jährlichen Workshops und Gutachtersitzungen erfolgt ebenfalls über dieses Arbeitspaket.
Teilprojektleitung: PD Dr.-Ing. M. Ali Nasseri
Beteiligte Einrichtungen:
- Klinikum rechts der Isar, Klinik und Poliklink für Augenheilkunde, Medical Autonomy and Precision
- Technische Universität München, Lehrstuhl für Ergonomie
Arbeitsgruppe – Ergonomie und UI-Technologien (AG-EUI)
Die AG stellt eine übergeordnete Organisationsstruktur dar, innerhalb der roboterassistierten Chirurgie bezogene, übergreifende Querschnittsthemen bearbeitet werden. Erkenntnisse, die in dieser Arbeitsgruppe erarbeitet werden, lassen sich direkt auf unterschiedlichste Bereiche der roboterassistierten Chirurgie, welche über die drei Cluster repräsentiert sind, übertragen und können im Rahmen des Projektes an den jeweiligen erprobt werden. Die AG-EUI beschäftigt sich im Rahmen des Projektes im Wesentlichen mit drei Hauptaspekten: Analysen zu Arbeitsabläufen und Prozessen in der Roboter-assistierten Chirurgie, Entwicklungen zur frühzeitigen Detektion von Störungen im Operationsablauf durch körperliche und kognitive Belastung und Beanspruchung, Gestaltung von Mensch-Maschinen-Schnittstellen für die ergonomische und intuitive Positionierung und Bedienung von Robotersystemen im Operationssaal .
Teilprojektleitung: Max Bergholz
Beteiligte Einrichtungen:
- Technische Universität München, Lehrstuhl für Ergonomie (LfE)
- ITK Engineering GmbH, Geschäftsbereich Medizintechnik
Arbeitsgruppe – Klinische Integration (AG-KLI)
Die AG, welche über die klinische Forschergruppe MITI und das Zentrum für Medizinische Robotik und Maschinelle Intelligenz (MRMI) die benötigten medizinischen Fachbereiche des Klinikum rechts der Isar inklusive Pflege und Assistenzberufe einbringt, stellt den übergreifenden Verbund auf der Anwendungsseite dar. Die vorhandene umfassende Erfahrung mit robotischen Anwendungen und Systemen und deren Nutzung in der klinischen Routine erlaubt es, prozessbezogene Anforderungen aufzuzeigen, Ergebnisse zu bewerten und daraus die gewünschten Verbesserungspotentiale abzuleiten. Die enge Verzahnung zu allen Clustern des Konsortiums und der AG-EUI sichert hierbei den Bezug zur späteren Anwendung und die Übertragbarkeit der Ergebnisse in die klinische Routine. Die AG-KLI steht verantwortlich für die Definition prozeduraler Anforderungen, wie etwa hygienischen, sicherheitstechnischen oder administrativen Aspekten.
Teilprojektleitung: Prof. Dr. med. Dirk Wilhelm
Beteiligte Einrichtungen:
Klinikum rechts der Isar, Forschungsgruppe Minimalinvasive Interdisziplinäre Therapeutische Interventionen
Cluster I, Modulare Robotiksysteme (C-I)
Der Cluster fokussiert sich auf modulare, mehrarmige Robotersysteme und das Anwendungsbeispiel RAS in der Viszeralchirurgie. Modulare Systeme erlauben die Verwendung von aktuell bis zu vier robotischen Armen, die individuell um den Patienten installiert und für chirurgische Interventionen in diversen Fachbereichen genutzt werden können. Der modulare Charakter der genannten Systeme erlaubt theoretisch zahlreiche Setups, die von Single-Arm über hybride bis zu vollrobotischen Eingriffen reichen, d.h. die Systeme weisen eine vergleichsweise hohe Flexibilität auf. Aktuell muss jedoch konstatiert werden, dass entweder nur ein Arm eingesetzt wird, oder man 3 bis 4 Arme nutzt, meist unter Assistenz eines laparoskopischen Instrumentes (“4+1“). Das große Potential hybrider RAS Systeme ist somit in vielerlei Hinsicht ungenutzt.
Teilprojektleitung: Julian Klodmann
Beteiligte Einrichtungen:
- Deutsches Zentrum für Luft- und Raumfahrt, Institut für Robotik und Mechatronik
- KARL STORZ VentureONE Germany GmbH
- AKTORmed GmbH
Cluster II, Mikro-Robotiksysteme (C-II)
Der Cluster adressiert am Anwendungsbeispiel der vitreoretinalen Chirurgie die mit der roboterassistierten Chirurgie in diesem Bereich einhergehenden Herausforderungen, wie zum Beispiel sehr hohe Präzision und gleichzeitig geringe Kräfte. Mögliche Anwendungsszenarien, wie bspw. “subretinale Injektionen” und die Behandlung von “retinalen Venenverschlüssen”, werden in der Anforderungsanalyse definiert. Innerhalb dieser können die genauen Anforderungen an das mikro-robotische System definiert werden. Die Workflows der zu betrachtenden Anwendungsszenarien werden formalisiert, so dass eine Integration des mikro-robotischen Systems in den chirurgischen Prozess erfolgen kann und Teile in Zusammenarbeit mit der AG-KLI automatisiert bzw. mit der AG-EUI intuitiver gestaltet werden können. Der Schwerpunkt des Clusters liegt dabei auf der Optimierung der Positionierung des Mikro-Robotersystems im OP und der robotischen Ausführung des Eingriffes (bzw. Teile davon), um für den Patienten und Operateur die Sicherheit und Effektivität zu erhöhen und zu gewährleisten.
Teilprojektleitung: Prof. Dr. Franziska Mathis-Ullrich
Beteiligte Einrichtungen:
- Friedrich-Alexander-Universität Erlangen-Nürnberg, Dep. Artificial Intelligence in Biomedical Engineering
- Klinikum rechts der Isar, Klinik und Poliklink für Augenheilkunde, Medical Autonomy and Precision
- Custom Surgical GmbH
Cluster III – Integrierte Robotiksysteme (C-III)
In diesem Teilprojekt werden Themen der robotergestützten Bilderfassung am Beispiel der autonomen, robotergestützten Ultraschalldiagnostik vertieft untersucht. In diesem Cluster werden Fragen im Zusammenhang mit der automatischen Planung und Erfassung von 2D- und 3D-Ultraschallscans mit besonderem Fokus auf die Schaffung von Vertrauen der Ärzte und die Akzeptanz der Patienten bei der autonomen Erfassung untersucht. Das Vertrauen des Arztes und die Akzeptanz des Patienten sind besonders wichtig für den Übergang von manuellen zu autonomen, robotergestützten Ultraschalluntersuchungen, da die Ärzte an die Intelligenz, Korrektheit, Reproduzierbarkeit und Sicherheit des autonomen Roboters glauben müssen, während die Patienten wach sind, und das Robotersystem akzeptieren und daher während der robotergestützten Bildaufnahme kooperieren sollten. Die geplanten Arbeiten zu Visualisierungsmethoden und Benutzerschnittstellen bauen auf Techniken auf, die in enger Zusammenarbeit mit der AG-EUI entwickelt wurden.
Teilprojektleitung: Prof. Dr. Nassir Navab
Beteiligte Einrichtungen:
- Technische Universität München, Lehrstuhl für Anwendungen in der Medizin
- ImFusion GmbH